Марсоход Curiosity программы Mars Science Laboratory провел более 70 солов, исследуя обнажение горы Мон-Мерку в кратере Гейла в 2021 году, и получил уникальный набор изображений с широким пространственным охватом и высоким перекрытием. Это позволило нам создать трехмерную цифровую модель обнажения (ЦМО) высокого разрешения, используя 6825 изображений, полученных мачтовой (Mastcam) и навигационной (Navcam) камерами марсохода, путем обработки по процессу «Структура из движения» (Structure from Motion, SfM). Этот процесс часто бывает сложным и трудоемким, поэтому нами разработан новый конвейер предварительной обработки на основе Python, облегчающий создание больших ЦМО.
- Предварительная обработка изображений с марсохода
- Рабочий процесс SfM
- Построение полигональной модели и текстурирование
- Масштабирование и контроль точности
- Дальнейшая работа
- Доступность данных
Предварительная обработка изображений с марсохода
Одной из сложностей работы с изображениями марсохода, архивированными в PDS, является обработка метаданных и конвертация из формата VICAR в общепринятые форматы изображений. Цель нашего конвейера — преобразование изображений PDS в совместимые с промышленными стандартами форматы изображений и включение метаданных в стандартизированные теги EXIF/XMP, что делает конвертированные изображения совместимыми с SfM и другими приложениями для обработки изображений. Внутренне изображения считываются с помощью утилиты Planetary Data Reader (PDR), а местоположение каждого изображения вычисляется путем комбинирования камерной модели CAHVOR с локализацией марсохода из архива PLACES PDS. Эти метаданные преобразуются в теги EXIF/XMP для описания внутренней и внешней модели камеры, позволяя локализовать каждое изображение с точностью до 0,5 метра относительно базовой карты миссии (рис. 1). Наш конвейер преобразует изображения в промежуточный файл Adobe DNG, содержащий исходный массив изображений PDS и дополнительные метаданные, описывающие способ дебайеризации и цветовой обработки изображения. Наш конвейер может автоматически преобразовывать их в файлы TIFF с помощью RawTherapee, применяя зенитное масштабирование и баланс белого для гомогенизации яркости и цветов во всем наборе изображений. Кроме того, наш конвейер преобразует доступные маски навигационной камеры в файлы TIFF, чтобы обеспечить маскировку ровера в реконструкциях SfM.

Рисунок 1. Позиции изображений мачтовой и навигационной камер Curiosity (синие точки) между 3047 и 3117 солом, отображенные в Metashape на базовой карте HiRISE.
Белый контур соответствует итоговой реконструированной области ЦМО
Рабочий процесс SfM
Мы импортировали преобразованные изображения и маски в Agisoft Metashape, где они автоматически группируются в калибровочные группы, а их исходные фокусные расстояния устанавливаются в соответствии с метаданными EXIF/XMP. Положения и ориентации камер автоматически считываются из метаданных XMP и действуют как ограничения во время реконструкции, обеспечивая правильный масштаб и ориентацию ЦМО. Поскольку все координаты камер указаны для планетодезической системы Марса, мы также изменили систему отсчета в Metashape на Mars 2000, импортировав специальное определение WKT. Для каждого изображения была установлена точность позиционирования 0,5 м и угловая точность 3 градуса для ограничения реконструкции.
Даже при наличии метаданных о позиционировании для каждого изображения многомасштабный характер изображений с марсохода делает реконструкцию сложной и иногда требует размещения контрольных точек вручную для улучшения выравнивания. Мы исследовали несколько настроек выравнивания в Metashape и нашли метод, который стабильно обеспечивал хорошее выравнивание с минимальным количеством необходимых ручных настроек для нашего набора изображений. Несмотря на то, что Metashape может использовать предварительные позиции камеры для ускорения выравнивания, мы обнаружили, что любой вид предварительного отбора в Metashape значительно снижает качество выравнивания и количество совпадений между изображениями Navcam и Mastcam. Вместо этого мы обнаружили, что сопоставление методом полного перебора с установкой Высокой точности, увеличением Лимита ключевых точек до 40 000 и Лимита связующих точек до 10 000 привело к наиболее надежному выравниванию (рис. 2). Этот метод обычно приводит к правильному выравниванию всех изображений Navcam и большинства (~80%) всех левых и правых изображений Mastcam. Кроме того, некоторые группы изображений Mastcam могут быть выровнены неправильно, что требовало их ручной фильтрации.
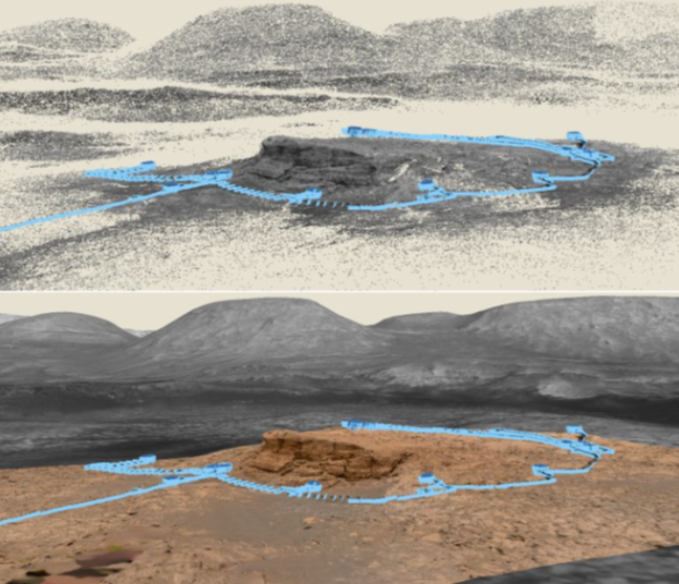
Рисунок 2. Итоговые очищенные точки привязки (сверху) и реконструкция ЦМО с трехмерным видом карты (снизу) в Metashape.
Синие маркеры обозначают изображения с навигационной и мачтовой камеры
Построение полигональной модели и текстурирование
После достижения качественного выравнивания мы реконструировали модель непосредственно по картам глубины, используя Высокую настройку качества. Верхний передний край скалы Мон-Мерку не удалось реконструировать точно, поскольку на изображениях он был виден только с ребра. Поэтому некачественная геометрия была удалена, а образовавшийся узкий зазор заполнен вручную. Далее модель была текстурирована как тайловая модель с использованием только цветных изображений Mastcam с разрешением текстуры локально 2,5 мм/пиксель (рис. 2 и 3). Версия модели с пониженным разрешением была загружена на Sketchfab.
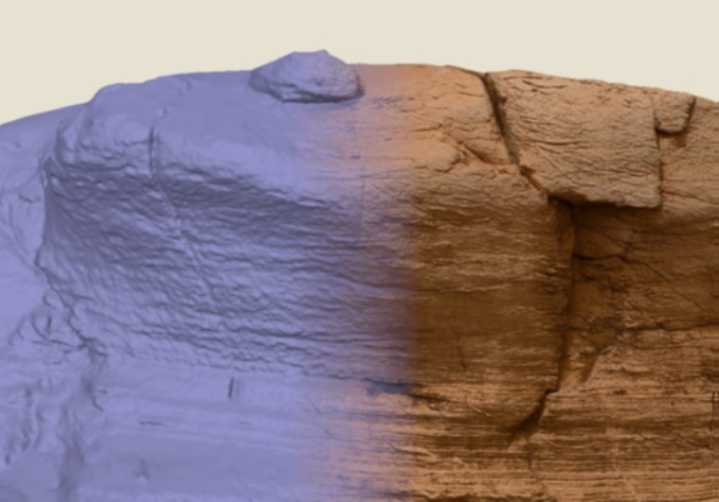
Рисунок 3. Детальный вид конечной реконструированной сетки (слева) и текстурированной сетки (справа) с использованием цветных изображений Mastcam
Масштабирование и контроль точности
Для использования этой модели в геологической интерпретации большое значение имеет точное масштабирование и ориентация модели. Мы подтвердили точность путем сравнения модели с ортомозаикой HiRISE и ЦММ. Было проведено несколько серий измерений длиной от 23 м до 56 м между ключевыми особенностями, присутствующими на ЦМО и различимыми на ортомозаике HiRISE. Средняя погрешность составила 1%. Сравнивая фотограмметрическое облако точек с ЦММ с помощью алгоритма итеративной ближайшей точки (ICP), мы определили погрешность ориентации в 0,3 градуса.
Дальнейшая работа
Помимо содействия геологической интерпретации, крупные ЦМО Марса также могут быть интересным средством для образования и работы с общественностью. Для последнего важна бесшовная и иммерсивная визуализация, например, интеграция нашей модели в VR-представление кратера Гейл. Ранняя версия этой интеграции уже была разработана в Blender (рис. 4).
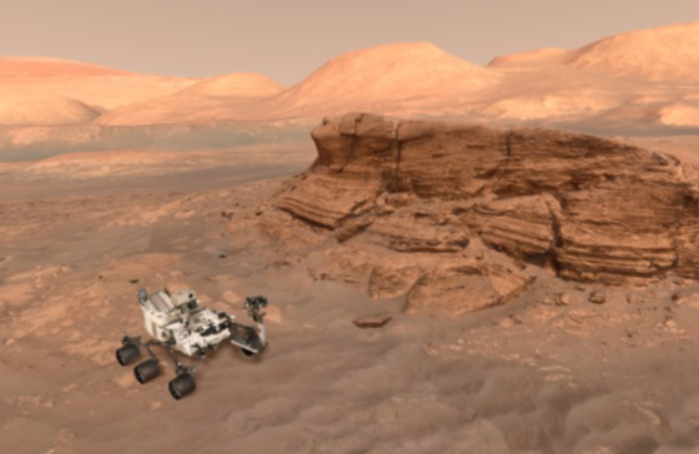
Рисунок 4. Интеграция ЦМО горы Мон-Мерку в полномасштабную модель кратера Гейл, созданную с использованием орбитальных снимков.
Для масштаба показана модель марсохода Curiosity
Доступность данных
Данные для этой работы доступны в Планетарной системе данных NASA (PDS).
Ссылки на источники, используемые в статье, были удалены. Библиография доступна в оригинальной публикации.
Авторы статьи: С. Шмаус (Лаборатория планетологии и геодинамики, UMR 6112 CNRS, Университет Нанта, Франция; Атлантическая обсерватория Наук о вселенной университета Нанта (Осуна), UAR 3281 CNRS, Университет Нанта, Франция),
С. Ле Мюлик, Н. Мангольд, Л. Кавалье (все - Лаборатория планетологии и геодинамики, UMR 6112 CNRS, Университет Нанта, Франция),
Б. Сеньовер (Атлантическая обсерватория Наук о вселенной университета Нанта (Осуна), UAR 3281 CNRS, Университет Нанта, Франция),
Г. Каравака (Лаборатория геодинамики окружающей среды университета Тулузы (GET), Университет Тулузы, CNRS, IRD, CNES, Франция).
Статья — перевод оригинальной публикации из материалов научной конференции по лунным и планетарным наукам (56th LPSC 2025).